Mugendai(無限大)
ロボットを着て、いざ出かけよう!――重い作業や歩行支援、スポーツの技術習得も
2020年11月10日
カテゴリー Mugendai(無限大)
記事をシェアする:
作業時に装着して体の負担を軽くする「着るロボット」が普及している。使用者にとって大事な点は、ロボット装着を忘れるほど、体の動きに合わせてシームレスな支援ができるかどうかにある。
その点で高い評価を得ているのが、株式会社ATOUN(あとうん:本社・奈良県)が開発したパワードウェアだ。「ATOUN MODEL Y」と「ATOUN MODEL Y + kote(コテ)」は、センサー、モーター、ワイヤー、制御技術を駆使し、人が自力で動く「能動」と、ロボットの力で動かされる「受動」が無意識のうちに融合する「中動態」の心地よさが持ち味となっている。
さらに、同社代表取締役社長の藤本弘道氏は、日々の人の歩行を支援する「HIMICO(ヒミコ)」も開発し、今年度中の販売を計画している。
最近コロナによる巣ごもりで外出が減ったために、筋力が衰える中高年者が増加している。心理的にもネガティブになりがちで、放置していると介護が必要な身体になってしまう。
試作中のHIMICOを装着して挑戦した観光ツアーでは、足腰が弱った人々も歩くことに自信を取り戻すことができ、旅の楽しみを満喫できたと好評だった。
藤本氏は、人が身体能力を自由に拡張して動き回れる「フリーアビリティ社会」を提唱している。それはどんな社会なのか、人間とロボットの理想の未来図を語っていただいた。
目次

(ふじもと・ひろみち)
株式会社ATOUN 代表取締役社長
1997年大阪大学工学研究科原子力工学専攻修了、松下電器産業株式会社(現パナソニック株式会社)モータ社モータ技術研究所材料開発グループ、 2002年パナソニック・スピンアップ・ファンド推進室、ポストMBA研修、2003年アクティブリンク株式会社(現株式会社ATOUN)創業代表取締役社長就任。現在に至る。
MODEL Yは腰の負担を10kg分軽減。作業支援の現場に注力
――現在の主力製品である「ATOUN MODEL Y」と「ATOUN MODEL Y + kote(コテ)」は、それぞれどのような場面で利用されるのでしょうか。その機能も合わせてご紹介ください。
藤本 MODEL Yは重い荷物を持ち運びする作業を支援するパワードウェアです。MODEL Y +koteはそれに腕の負担を軽減するkoteを付加しています。

ATOUN MODEL Y

ATOUN MODEL Y +kote
藤本 装着した人の腰や腕の動きをセンサーが感知し、モーターが回って、いわば「あうんの呼吸」で追従する仕組みです。物流・運輸系の倉庫や製造業の工場、建設土木、農林業など、荷物を運んだり材料を投入したりする職場で主に使っていただいています。
MODEL Yは腰の負担を10kg分軽減します。それとは別に + kote は、腕の負担を左右それぞれ6kgサポートし、両腕では合計12kg軽減します。MODEL Y自体の重さは4.5kgと小学生のランドセルと同じくらいで、既に全国で約700台が活躍しています。

建設の現場で活躍するATOUN MODEL Y
藤本 介護の分野での使用についても、もちろん検討しています。ただ、調査してみてわかったのは、介護現場では既にさまざまなアシストスーツが導入されているものの、それらが十分に活用されているわけではないということです。原因の1つは、活かし方をきちんと検証できていないこと。そこで私たちは介護施設と協力して実証実験を重ね、パワードウェアの力が適切に発揮されるように分析を続けています。現時点では、床ずれ予防のために身体の位置を動かすとか、深夜のオムツ替えなど、中腰での作業が長時間連続する場面では、特に効果を発揮することなどが分かっています。
筋肉が衰えると外出が減る。負のスパイラルを防ぐHIMICO
――歩行支援をするHIMICO(ヒミコ)についても、説明していただけますか。HIMICOを着けた人が香川県琴平町の金刀比羅宮の長い石段を上って行ったり、紅葉ハイキングを楽しんでいる動画を見ると、こちらまで嬉しくなります。
藤本 「HIMICO」というのは開発段階の呼び名です。当社ではプロトタイプにはいつも地元の奈良にちなんだ名前を付けることにしており、「卑弥呼」からとっています。社名も、奈良の東大寺にある金剛力士像の阿吽にちなみ、人間を表す「A(阿、あ)」と、ロボットを表す「UN(吽、うん)」が調和する、私たちの理想の精神とも言える「あうんの呼吸」から命名しました。
HIMICOにはkoteと同じワイヤーアシストという技術を使っていて、脚の動きをセンサーが感知してモーターがワイヤーを伸縮させてアシストします。年齢を重ねるなどして、脚が上がりにくくなってきたな、と感じている方でも歩行が楽になります。重さは2.5kg。腰に巻いてしまうと、高齢の方でも重さをほとんど感じないとおっしゃっています。

HIMICO
藤本 高齢になるとどうしても筋肉が衰えるので、外に出るのがおっくうになり、心理的にもネガティブな状態になりがちです。するとさらに筋肉が落ち、負のスパイラルに陥ります。この状態を一般的に「フレイル(身体活動、筋力、歩行速度が低下した状態)」と言い、そのまま放置すると介護を受けざるを得なくなります。
しかし、フレイルの状態ならまだ元に戻れるので、意識して歩くように心がけ、身体を動かすことが必要です。HIMICOはそうした方々を支援するために活躍します。
今のところ具体的な用途としては症状に応じて、①デイケア施設でのトレーニング、②フィットネスクラブでの運動、③旅を諦めている方々へのスマートツーリズムの提供、の3つを想定しています。いくつかのサービスはすでに始まっています。
その他、林業に携わる人たちが、山の急な斜面を何度も上り下りする際に、脚と腰をサポートするために活用していただくなど、今後いろいろな場面で活用が広がっていくものと思われます。

坂道も長い階段も、 HIMICOのおかげで自信回復!
関節の動きをモーター軸の回転として捉え、動作意図を読み取る
――センサー、モーター、ワイヤーを駆使する制御技術について解説していただけますか。また開発にあたって特に苦労された点、製品の特長などをお聞かせください。
藤本 まずMODEL Yですが、人がモノを持ち上げたり下ろしたりする時は腰関節が回転します。それをモーター軸の回転として捉え、角度や角速度も加味して素早く動きに追従し、腰の動きをアシストします。
腕の機能を支援するkoteは、手首に繋がるワイヤーを肩付近に固定したモーターが巻き取ってアシストします。センサーは指先にあり、左右の腕を別々に制御します。
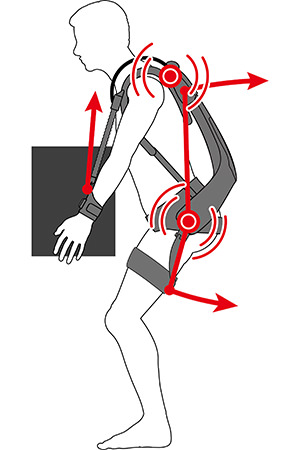
MODEL Y + koteのパワフルなダブルアシスト
藤本 一方、HIMICOは、着用者の歩行を慣性センサーで検出します。最初の2歩でその人の歩き方の周期などの特徴をつかんで、最適なアシスト方法を決めて歩行に追従します。センシングしてからモーターが動くまで0.2秒以内なので、少し歩くだけでも、ほとんど自分の力で動いているように感じてもらえます。
人とロボットが一体になって動いているこの感覚を、私たちは「中動態」と呼んでおり、開発の重要なポイントになっています。
身体の一連の動きをシームレスにアシストする
――「中動態」というのはあまり聞きなれない言葉です。説明していただけますか。
藤本 中動態とは、自力で動く「能動」であると同時に、他力で動かされる「受動」でもある状態のことです。電動自転車を思い浮かべていただくと、分かりやすいでしょう。人がペダルをこぐのは能動ですが、裏側ではモーターがその動きをアシストしていて受動の力も働いています。いわば、自分が動かしているのか、機械に動かされているのか、区別がつかない感覚。この中動態こそが、パワードウェアと人間の理想的な関係だと私たちは考えています。
今取り組んでいるのは、HIMICOを装着した人が歩行を止めた時、HIMICO側もそれに合わせて違和感なくアシストを弱める技術の開発です。今のままでもスムーズに歩いてはいただけるのですが、完成すれば、「気持ちのいい歩きができた」と思っていただけると思います。
作業支援のMODEL Yは、お客様からよく「動きやすい」と褒められます。例えばモノを持ち上げ、その状態で歩き、片足を出して半身の姿勢で保持するといった一連の動きに対して、スイッチの切り替えなしに、シームレスにアシストします。それはHIMICOも同じで、ロボットによるアシストを意識することなく自然に歩くことができます。この中動態の実現こそ、私たちが最も工夫してきた点であり、弊社製品の最大の特長の1つです。
人も社会も健全になるエコシステムに貢献したい
――HIMICOが手軽に使えるようになると、外出を諦めていた人が旅を楽しんだり、身体を動かしたりできて、社会が明るくなると思います。
藤本 最近、Well-beingという言葉がよく使われます。人々の身体や精神が健康になれば、QOLが向上するのはもちろん、医療や介護などのコストが少なくてすみますから、社会としても大きなメリットがあります。さらに、私たちのパワードウェアによってシニアの皆さんの外に出かける意欲が増せば、新たな消費が生まれ、お金が社会に還元されます。当社としては、ぜひそういうエコシステムに貢献したいと思っています。
――それぞれのパワードウェアの値段はどの程度なのでしょうか。
藤本 オープン価格ですので公表していませんが、リースも可能で、MODEL Yだと月額1万8000円前後(4年リース時)です。
HIMICOについては、近畿日本ツーリストとクラブツーリズムを傘下に持つKNT-CTホールディングス社が、試験的にHIMICOを使った旅のパッケージを提供しています。通常の旅行代金に数千円追加すれば、旅行中にHIMICOを使うことができます。
来年あたりから、本格的にHIMICOの普及にも取り組む予定です。地方自治体との連携も検討していますし、観光案内所などで観光客に貸し出したり、地域のデイケア施設などで使っていただいたりすることで、地域社会や経済にもいい影響をもたらせたらと考えています。
「パワーバリアレス社会」から「フリーアビリティ社会」へ
――藤本社長は「人間が本来の身体能力を自由に拡張して動き回れる『フリーアビリティ社会』を目指す」と述べておられます。これについて解説していただけますか。
藤本 2003年の創業時、私たちは「パワーバリアレス社会を創ろう」というキャッチフレーズを掲げていました。その目標は、今年度にMODEL Y + koteを実現できたことで、入り口に到達したと思っています。
次に注目しているのは、アビリティ(物事ができる能力や力量)です。パワードウェアを活用して、もっと自由にアビリティを獲得できるような社会をつくりたい。それが「フリーアビリティ社会」です。
ヒントはHIMICOにありました。HIMICOは力仕事ではなく、人が歩くのを支援します。これをさらに発展させると、パワードウェアを使って、例えば一流のアスリートの動作を型として体験することもできます。それにより、もっと上手にスポーツが出来たらいいな、もっと早く上達したいな、といった希望に応えられないだろうか、と思ったのです。
その際必要になるのは、人がスッと中動態に入り、動作の型にそって自然に身体を動かして、アビリティを獲得できるようにする制御技術です。私たちがこれから開発するプロダクトは、すべてこのフリーアビリティ社会の実現を念頭に置いています。
――できればより軽く、薄く、なるべく装着していることが目立たず、本人も忘れてしまうぐらいまで軽量化できると、ぜひ自分も欲しいと思う人はたくさんいるでしょうね。
藤本 今後はどんどんそういった方向に進化させていきたいと思っています。携帯電話も初期はショルダーバッグのように大きく重かったのに、今では手のひらに収まるほど薄く小型軽量化され、驚くほど高性能化されています。技術の進化で解決していけると思っています。

10年先からバックキャストする「Sci₋Fiプロトタイピング」
――御社では、SF作家たちも参加して描いた未来のサイエンス・フィクションを、経営に取り入れていらっしゃると聞きます。その狙いを説明していただけますか。
藤本 「Sci₋Fi(サイファイ)プロトタイピング」という手法ですね。多くの企業は、これまでの延長線上で新しいプロダクトを開発します。でも、それではイノベーティブな飛躍は生まれにくい。だから、いったんもう少し先の未来、例えば10年先の社会や生活をSF作品をつくるように想像して、それを実現するために何をしなければいけないかとバックキャストして今を考える。すると、イノベーティブな発想が生まれやすくなります。
10年後のスポーツの世界なら、優れたアスリートの動作データをクラウドに保存しておき、別の人がパワードウェアにダウンロードすれば、その技術を覚えることもできます。今よりずっと技術の習得が早くなるはずです。あるいは、工場で働く熟練工の技能をアーカイブとして残しておけば、後輩たちが学ぶことができますし、習熟する時間をずっと短くできます。他にも、自分の身体の動きのベストな状態をデータ化しておき、筋力が低下したり、不調の時などにそれをカバーすることもできるかもしれません。こうしたSFで描かれるような未来の社会が将来実現するために、今何をしなくてはいけないのか。そういう発想から、プロダクトの開発にあたっています。
といっても、今掲げている2030年のビジョンは未来像とはいえ、もちろん実現すべきものですから、確実に前に進めていかなくてはいけないのですが…。2025年に大阪万博が開かれるので、その時にできるだけプロトタイプを展示したいと考えています。

HIMICOを着てリモート・フィットネス
フォーキャスト型ではイノベーションは起きない
――イノベーションの手段としてサイエンス・フィクションを使う手法は、他ではあまり聞いたことがありません。
藤本 Sci₋Fiプロトタイピングは、言葉としては5年ぐらい前に登場したようですが、当社では創業当時から同じやり方をしてきました。創業当初は、私が思い描く未来の“妄想”を仲間たちにも共有してもらう必要がありました。そこでSF作家や演出家、デザイナーなど3人の力を借りて未来像を描き出し、10年先にそうなるために7年後にはこう、5年後はこう……とバックキャストでやるべきことを考えて示すことで、皆の心を1つにしました。
未来を夢みる能力は、人間が本来持っているものですが、不思議なことに会社に入って社会人になると、その能力を忘れてしまい、フォーキャスト型に変わってしまいます。今自分が持っているものをどう生かして、着実に稼ごうかという発想になってしまうのです。
そんなフォーキャスト型ではイノベーションは起きません。イノベーションを起こすには、次元が変わるくらいの飛躍的なバージョンアップが必要です。フォーキャスト型だと改善は進みますが、しょせんアップデートしかできません。
世の中には、社員に「未来を提案してくれ」と言う一方で、「コアコンピタンスに沿ってやれ」と平気で言う企業があります。私はあちこちの社員研修で講師を頼まれますが、いつもバックキャストの発想の大切さを説くので、「バックキャストの伝道師」と呼ばれています(笑)。
未来、ロボットはファッションになる
――「色や形状を好きなようにカスタマイズし、自分らしさを表現できるファッショナブルなパワードウェアを作りたい」とも述べておられます。そうなれば、中高年も生活が楽しくなりますね。
藤本 本格的なフリーアビリティ社会が到来する頃には、パワードウェアは腰、脚、腕だけでなく、手首、足首、指、首など関節があるところすべてに装着できるようになり、自分の身体の状態に合わせて好きなように組み合わせて使うことができるでしょう。
まず、さまざまなセンサーを付けたアンダーウェアを着て必要なセンシングをする。その上に身体のアシストや保持をするパワードウェアを着る。その外側にはハイパワーの作業ができるような外骨格をまとう。この3段階のパワードウェアを、その日の仕事や生活に合わせて着るような時代になると予測しています。もっとも、そこまでになるのは2050年ぐらいかもしれませんけどね。
TEXT:木代泰之、写真提供:株式会社ATOUN
※日本IBM社外からの寄稿や発言内容は、必ずしも同社の見解を表明しているわけではありません。
関連リンク
女性技術者がしなやかに活躍できる社会を目指して 〜IBMフェロー浅川智恵子さんインタビュー
ジェンダー・インクルージョン施策と日本の現状 2022年(令和4年)4⽉から改正⼥性活躍推進法が全⾯施⾏され、一般事業主⾏動計画の策定や情報公表の義務が、常時雇用する労働者数が301人以上の事業主から101人以上の事業主 […]
Qiskit Runtimeで動的回路を最大限に活用する
私たちは、有用な量子コンピューティングのための重要なマイルストーンを達成しました: IBM Quantum System One上で動的回路を実行できるようになったのです。 動的回路は、近い将来、量子優位性を実現するため […]
Qiskit Runtimeの新機能を解説 — お客様は実際にどのように使用しているか
量子コンピューターが価値を提供するとはどういうことでしょうか? 私たちは、価値を3つの要素から成る方程式であると考えます。つまりシステムは、「パフォーマンス」、「機能」を備えていること、「摩擦が無く」ビジネス・ワークフロ […]